以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# BEVPlace: Learning LiDAR-based Place Recognition using Bird's Eye View Images
论文地址:https://arxiv.org/abs/2302.14325
作者单位:浙江大学
开源代码:https://github.com/zjuluolun/BEVPlace
位置识别是长期SLAM系统的关键模块。目前基于LiDAR的位置识别方法通常是基于无序点或距离像等点云的表示。这些方法实现了很高的检索召回率,但在视图变化或场景变化的情况下,它们的性能可能会下降。在这项工作中,我们探索了一种不同的表征在位置识别中的潜力,即鸟瞰(BEV)图像。我们观察到,BEV图像的结构内容受点云的旋转和平移的影响较小。
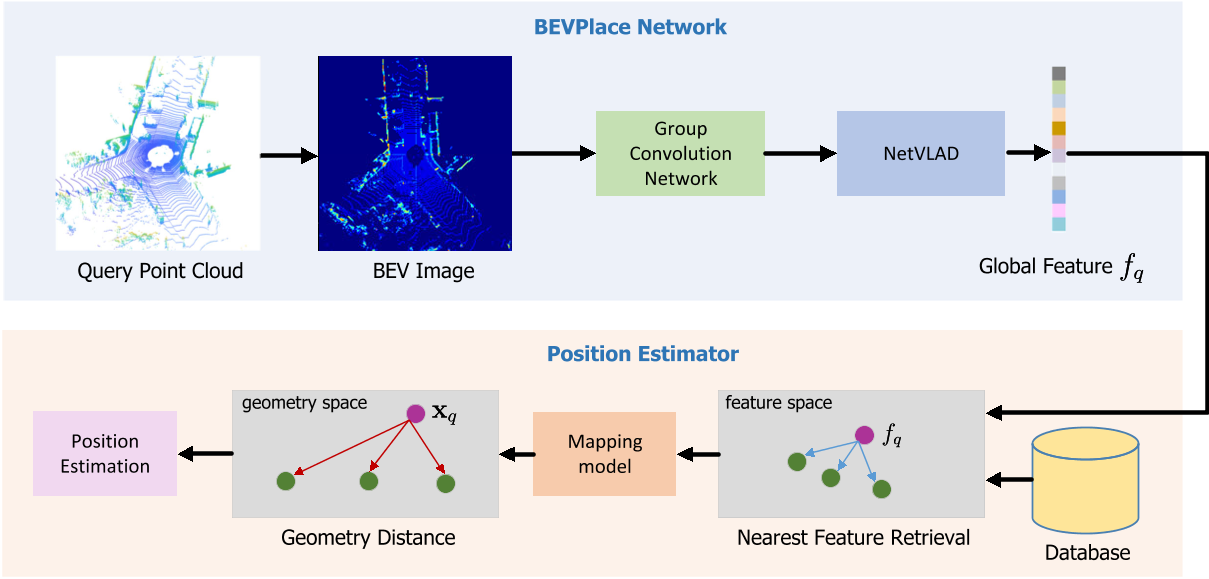
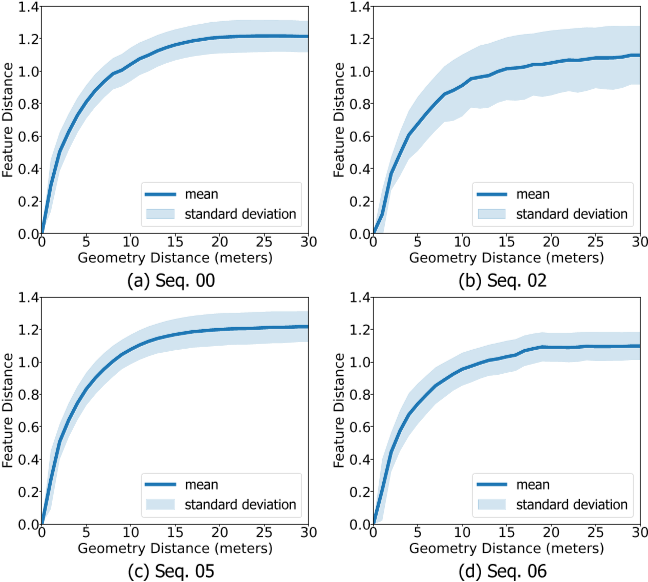
我们验证了,在没有任何精细设计的情况下,在BEV图像上训练的简单VGGNet在视点轻微变化的场景中取得了与最先进的位置识别方法相当的性能。为了提高位置识别的健壮性,我们设计了一个旋转不变网络BEVPlace。我们使用分组卷积来提取图像中旋转等变的局部特征,并使用NetVLAD来进行全局特征聚合。此外,我们还观察到BEV特征之间的距离与点云的几何距离相关。
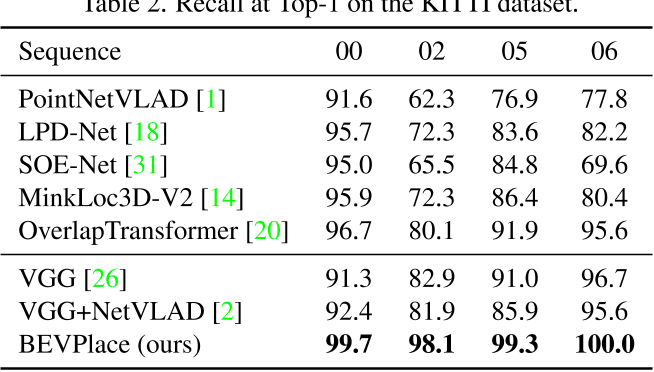
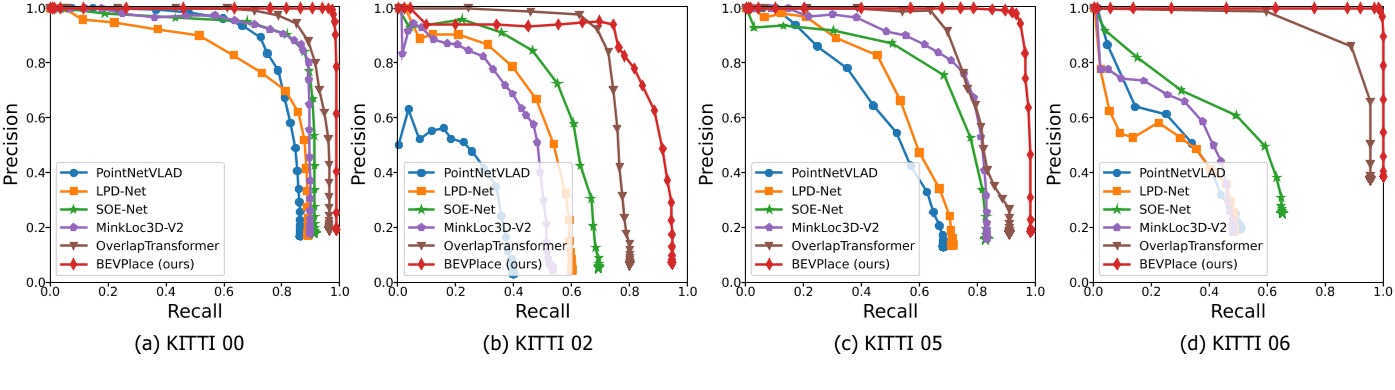
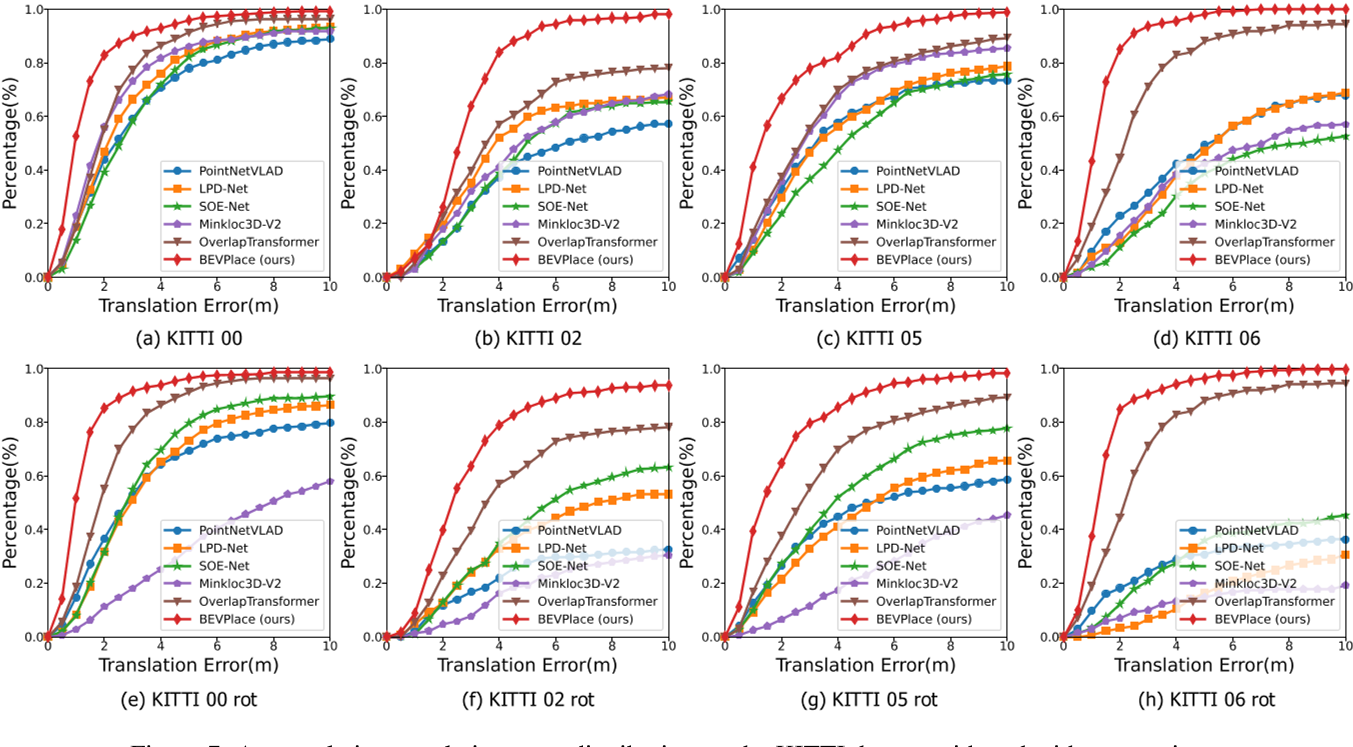
在此基础上,提出了一种位置云位置估计方法,扩展了位置识别的使用范围。在大规模公共数据集上进行的实验表明,该方法1)在查全率方面达到了最好的性能,2)对视图变化具有健壮性,3)具有很强的泛化能力,4)可以估计查询点云的位置。
本文贡献如下:
1、提出了一种新的基于LiDAR的位置识别方法BEVPlace。在该方法中,我们基于分组卷积从Bev图像中提取旋转等变的局部特征,这为旋转不变的全局特征的设计提供了便利。
2、探讨了点云对的特征距离和几何距离之间的统计相关性。基于这种相关性先验,我们计算了查询点云和匹配点云之间的几何距离,并将其用于位置估计。
3、我们在三个大规模公共数据集上对我们的方法进行了评估,结果表明,我们的方法对视图变化具有健壮性,具有很强的泛化能力,并且在召回率方面达到了最好的性能。

以上内容来自小六的机器人SLAM学习圈 每日更新内容