测试程序的界面如下:
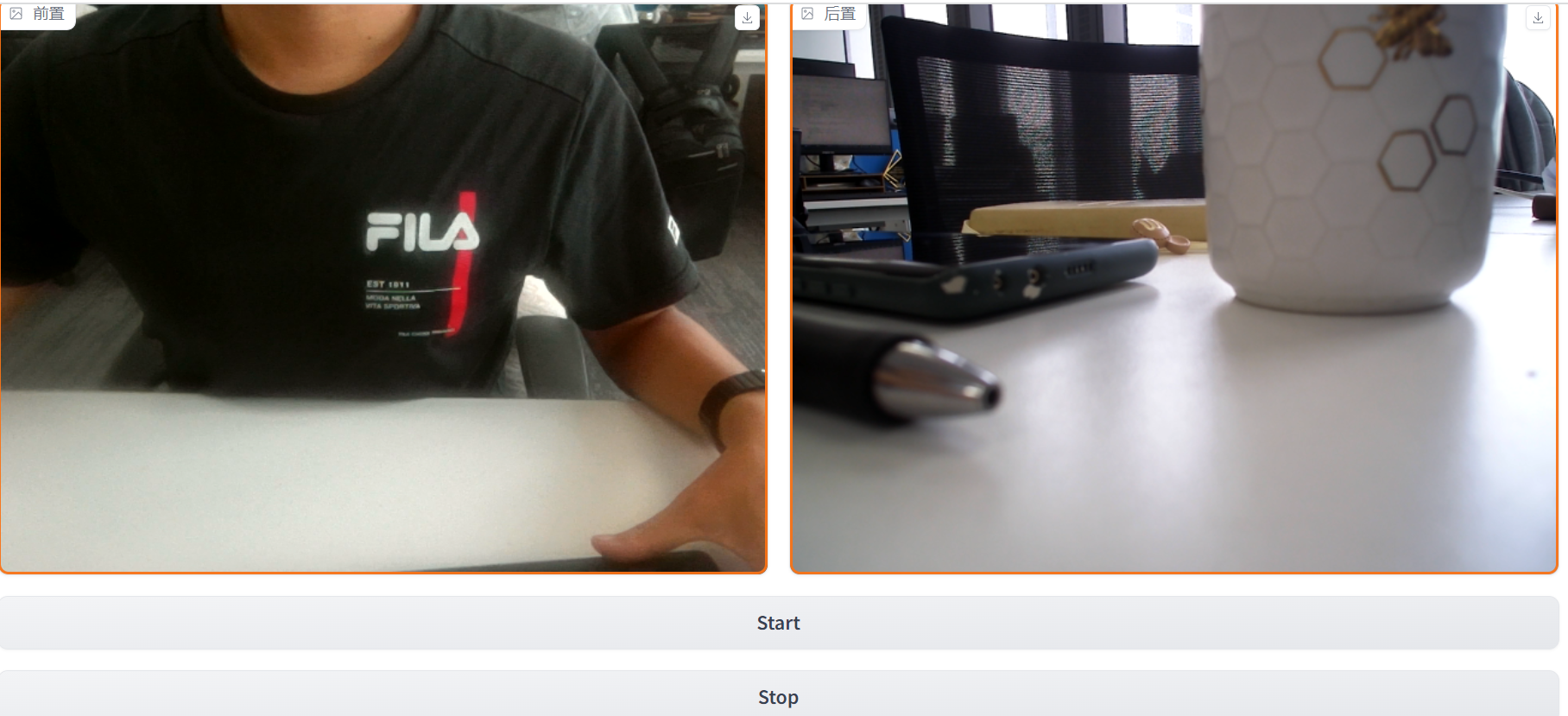
其程序在多线程实现摄像机读取的基础上直接进行调用和读取。
代码中实现前后摄像头的读取。
class IntelliGuideTab:
def __init__(self) -> None:
self.camera_info = {"height": 480, "width": 640}
self.create_ui()
self.camera1_process = None
self.camera0_process = None
self.camera0 = None
self.camera1 = None
self.create_camera()
def create_camera(self):
self.camera0 = CameraBroadcaster(self.camera_info,0)
self.camera0_process = Process(target=self.camera0.run)
self.camera0_process.start()
self.camera1 = CameraBroadcaster(self.camera_info, 1)
self.camera1_process = Process(target=self.camera1.run)
self.camera1_process.start()
def inference(self):
while True:
#图像从共享内存中获取
frame0 = np.ndarray((self.camera0.height, self.camera0.width, 3), dtype=np.uint8,
buffer=self.camera0.frame.buf)
frame1 = np.ndarray((self.camera1.height, self.camera1.width, 3), dtype=np.uint8,
buffer=self.camera1.frame.buf)
#必须转换,否则显示图像有问题,主要是opencv读取是BGR,显示是RGB
frame0 = cv2.cvtColor(frame0, cv2.COLOR_BGR2RGB)
frame1 = cv2.cvtColor(frame1, cv2.COLOR_BGR2RGB)
#此处必须是while循环,然后不停地返回图像
yield frame0,frame1
def stop(self):
#此处stop不起作用个,不知道为啥
print("start stop read camera")
self.camera0.stop_sign.value = True
self.camera0_process.join()
self.camera0.stop_sign.value = True
self.camera1_process.join()
print("finish stop read camera")
def create_ui(self):
#按照格局进行图像控件的读取
with gr.Column():
with gr.Row():
front_ouput = gr.Image(
label='前置',
source='upload',
width=self.camera_info["width"],
height=self.camera_info["height"],
interactive=False
)
back_input = gr.Image(
label='后置',
source='upload',
width=self.camera_info["width"],
height=self.camera_info["height"],
interactive=False
)
with gr.Row():
start_btn = gr.Button("Start")
#关键点在这,inference是处理函数,返回值是两个图像,然后绑定在gr.Image中
start_btn.click(self.inference, outputs=[front_ouput, back_input])
stop_btn = gr.Button("Stop")
stop_btn.click(self.stop)
if __name__ == "__main__":
title = 'Web Demo'
DESCRIPTION = '''its corresponding grounding mask'''
with gr.Blocks(analytics_enabled=False, title=title) as demo:
gr.Markdown(DESCRIPTION)
with gr.Tabs():
with gr.TabItem('IntelliGuide'):
IntelliGuideTab()
demo.queue().launch()
本来在程序中将图像放入到queue中,然后主线程获取,发现主线程获取较慢,导致显示延缓,queue的size不停地变大