一、前言
FreeRTOS是一个流行的实时操作系统,它允许用户创建多个任务并在它们之间共享处理器时间。在FreeRTOS中,任务的优先级别是非常重要的,因为它决定了任务在系统中的执行顺序。
二、任务优先级特点
-
FreeRTOS中的任务优先级别是一个整数,范围从0到configMAX_PRIORITIES-1,其中configMAX_PRIORITIES是系统中支持的最大任务优先级别数。默认情况下,configMAX_PRIORITIES被设置为32。
-
任务的优先级别越高,它们就越有可能在系统中运行。如果两个任务都处于就绪状态,那么具有更高优先级别的任务将首先运行。
-
在FreeRTOS中,任务的优先级别可以在运行时更改。这意味着您可以根据需要动态地调整任务的优先级别。
-
如果两个任务具有相同的优先级别,则它们将按照先进先出(FIFO)的顺序运行。这意味着先创建的任务将首先运行。
三、示例测试
1.函数介绍
与优先级有关的函数有两个,分别是查询函数uxTaskPriorityGet()和修改函数vTaskPrioritySet()
1)优先级查询
该函数中仅有一个输入参数,即任务的句柄,返回值为该任务的优先级
代码测试如下:
#include <stdio.h>
#include "driver/gpio.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "sdkconfig.h"
void mytask1(void *pvParam)
{
while (1)
{
printf("111 \n");
vTaskDelay(1000 / portTICK_PERIOD_MS); // 延时
}
}
void app_main(void)
{
UBaseType_t xpriorty;
TaskHandle_t xHandle = NULL; // 任务句柄,类似任务的数字标记,识别码,名字
xTaskCreate(mytask1, "mytask1", 1024, NULL, 2, &xHandle); // 传入参数
xpriorty = uxTaskPriorityGet(xHandle); //查询任务优先级并返回值
printf("priority is %d!\n", xpriorty); //打印出任务优先级
}
2)优先级修改
vTaskPrioritySet()是FreeRTOS中的一个API函数,用于设置任务的优先级。任务的优先级越高,调度器就越倾向于先执行该任务。因此,通过调整任务的优先级,可以实现任务的调度控制。需要注意的是,vTaskPrioritySet函数只是设置任务的优先级,而不是立即执行任务。任务的执行顺序还是由调度器决定的。如果想要立即执行任务,可以使用vTaskResume函数。
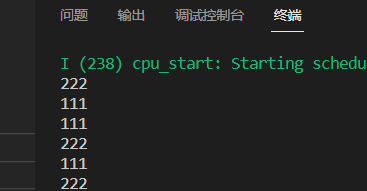
下列代码中首task1任务优先级为1,task2任务优先级为2,task2的优先级别更高,所以调度器会优先执行task2,紧接着调用vTaskPrioritySet()函数将task1的任务优先级由原来的1修改为3,使其优先级别更高,实现优先反转,调试效果如下:

#include <stdio.h>
#include "driver/gpio.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "sdkconfig.h"
void mytask1(void *pvParam)
{
while (1)
{
printf("111 \n");
vTaskDelay(1000 / portTICK_PERIOD_MS); // 延时
}
}
void mytask2(void *pvParam)
{
while (1)
{
printf("222 \n");
vTaskDelay(1000 / portTICK_PERIOD_MS); // 延时
}
}
void app_main(void)
{
TaskHandle_t xHandle = NULL; // 任务句柄,类似任务的数字标记,识别码,名字
xTaskCreate(mytask1, "mytask1", 1024, NULL, 1, &xHandle); // 传入参数
xTaskCreate(mytask2, "mytask2", 1024, NULL, 2, NULL); // 传入参数
vTaskPrioritySet(xHandle, 3); // 修改任务优先级为3
}
}
THE END!