import pygame
import math
from queue import PriorityQueue
# 初始化屏幕
WIDTH = 800
WIN = pygame.display.set_mode((WIDTH, WIDTH))
pygame.display.set_caption("A* Path Finding Algorithm")
# 定义颜色
RED = (255, 0, 0)
GREEN = (0, 255, 0)
BLUE = (0, 255, 0)
YELLOW = (255, 255, 0)
WHITE = (255, 255, 255)
BLACK = (0, 0, 0)
PURPLE = (128, 0, 128)
ORANGE = (255, 165, 0)
GREY = (128, 128, 128)
TURQUOISE = (64, 224, 208)
# 定义节点类
class Node:
def __init__(self, row, col, width, total_rows):
self.row = row
self.col = col
self.x = row * width
self.y = col * width
self.color = WHITE
self.neighbors = []
self.width = width
self.total_rows = total_rows
def get_pos(self):
return self.row, self.col
def is_closed(self):
return self.color == RED
def is_open(self):
return self.color == GREEN
def is_barrier(self):
return self.color == BLACK
def is_start(self):
return self.color == ORANGE
def is_end(self):
return self.color == TURQUOISE
def reset(self):
self.color = WHITE
def make_start(self):
self.color = ORANGE
def make_closed(self):
self.color = RED
def make_open(self):
self.color = GREEN
def make_barrier(self):
self.color = BLACK
def make_end(self):
self.color = TURQUOISE
def make_path(self):
self.color = PURPLE
def draw(self, win):
pygame.draw.rect(win, self.color, (self.x, self.y, self.width, self.width))
def update_neighbors(self, grid):
self.neighbors = []
if self.row < self.total_rows - 1 and not grid[self.row + 1][self.col].is_barrier(): # 下
self.neighbors.append(grid[self.row + 1][self.col])
if self.row > 0 and not grid[self.row - 1][self.col].is_barrier(): # 上
self.neighbors.append(grid[self.row - 1][self.col])
if self.col < self.total_rows - 1 and not grid[self.row][self.col + 1].is_barrier(): # 右
self.neighbors.append(grid[self.row][self.col + 1])
if self.col > 0 and not grid[self.row][self.col - 1].is_barrier(): # 左
self.neighbors.append(grid[self.row][self.col - 1])
def __lt__(self, other):
return False
# 启发式函数
def h(p1, p2):
x1, y1 = p1
x2, y2 = p2
dx = x1 - x2
dy = y1 - y2
return math.sqrt(dx ** 2 + dy ** 2) # 几何估价法
return abs(dx) + abs(dy) # 曼哈顿距离
# 重构最短路径
def reconstruct_path(came_from, current, draw):
while current in came_from:
current = came_from[current]
current.make_path()
draw()
# A* 寻路算法
def algorithm(draw, grid, start, end):
count = 0
open_set = PriorityQueue()
open_set.put((0, count, start))
came_from = {}
g_score = {node: float("inf") for row in grid for node in row}
g_score[start] = 0
f_score = {node: float("inf") for row in grid for node in row}
f_score[start] = h(start.get_pos(), end.get_pos())
open_set_hash = {start}
while not open_set.empty():
for event in pygame.event.get():
if event.type == pygame.QUIT:
pygame.quit()
current = open_set.get()[2]
open_set_hash.remove(current)
if current == end:
reconstruct_path(came_from, end, draw)
end.make_end()
return True
for neighbor in current.neighbors:
temp_g_score = g_score[current] + 1
if temp_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = temp_g_score
f_score[neighbor] = temp_g_score + h(neighbor.get_pos(), end.get_pos())
if neighbor not in open_set_hash:
count += 1
open_set.put((f_score[neighbor], count, neighbor))
open_set_hash.add(neighbor)
neighbor.make_open()
# draw()
if current != start:
current.make_closed()
return False
# 创建网格
def make_grid(rows, width):
grid = []
gap = width // rows
for i in range(rows):
grid.append([])
for j in range(rows):
node = Node(i, j, gap, rows)
grid[i].append(node)
return grid
# 绘制网格线
def draw_grid(win, rows, width):
gap = width // rows
for i in range(rows):
pygame.draw.line(win, GREY, (0, i * gap), (width, i * gap))
for j in range(rows):
pygame.draw.line(win, GREY, (j * gap, 0), (j * gap, width))
# 绘制
def draw(win, grid, rows, width):
win.fill(WHITE)
for row in grid:
for node in row:
node.draw(win)
draw_grid(win, rows, width)
pygame.display.update()
# 获取点击位置
def get_clicked_pos(pos, rows, width):
gap = width // rows
y, x = pos
row = y // gap
col = x // gap
return row, col
# 主函数
def main(win, width):
ROWS = 50
grid = make_grid(ROWS, width)
start = None
end = None
run = True
started = False
while run:
draw(win, grid, ROWS, width)
for event in pygame.event.get():
if event.type == pygame.QUIT:
run = False
if started:
continue
if pygame.mouse.get_pressed()[0]: # 左键点击
pos = pygame.mouse.get_pos()
row, col = get_clicked_pos(pos, ROWS, width)
if row < 0 or row >= ROWS or col < 0 or col >= ROWS:
continue
node = grid[row][col]
if not start and node != end:
start = node
start.make_start()
elif not end and node != start:
end = node
end.make_end()
elif node != end and node != start:
node.make_barrier()
elif pygame.mouse.get_pressed()[2]: # 右键点击
pos = pygame.mouse.get_pos()
row, col = get_clicked_pos(pos, ROWS, width)
node = grid[row][col]
node.reset()
if node == start:
start = None
elif node == end:
end = None
if event.type == pygame.KEYDOWN:
if event.key == pygame.K_SPACE and not started:
for row in grid:
for node in row:
node.update_neighbors(grid)
algorithm(lambda: draw(win, grid, ROWS, width), grid, start, end)
if event.key == pygame.K_c:
start = None
end = None
grid = make_grid(ROWS, width)
pygame.quit()
main(WIN, WIDTH)
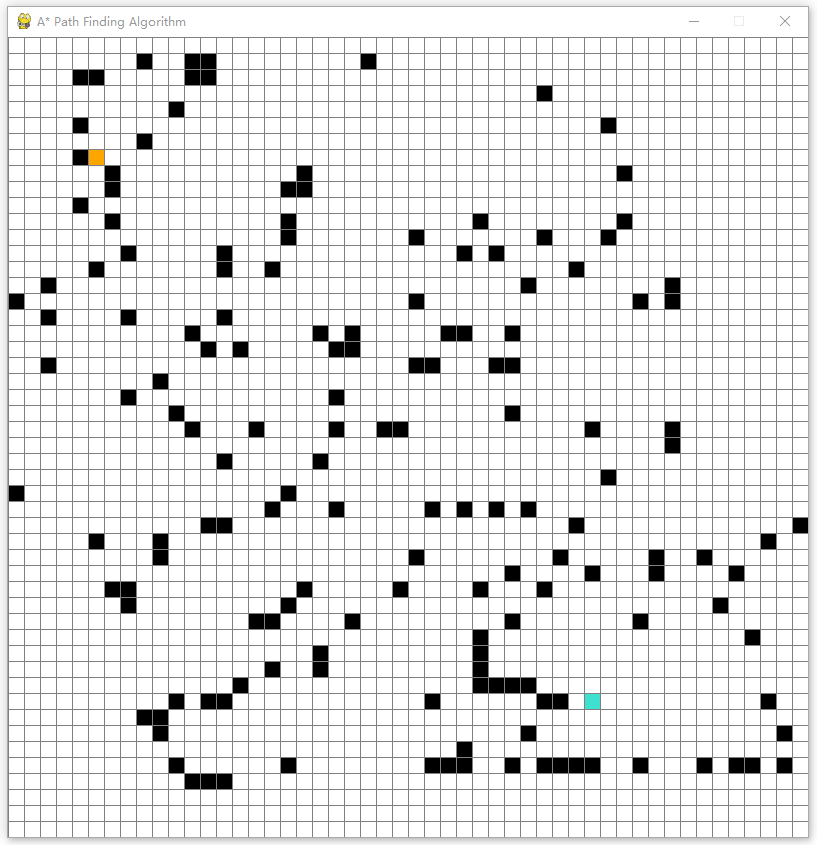
运行效果:

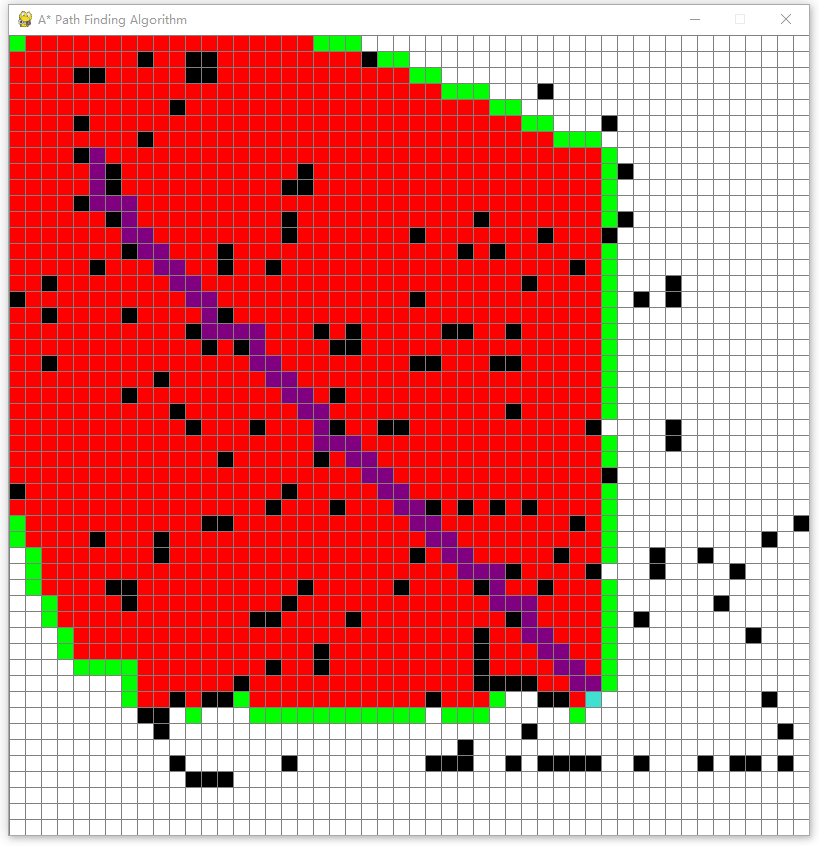
寻路结果: