以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
论文# Global Localization in Unstructured Environments using Semantic Object Maps Built from Various Viewpoints
论文地址:https://arxiv.org/abs/2303.04658
作者单位:麻省理工学院
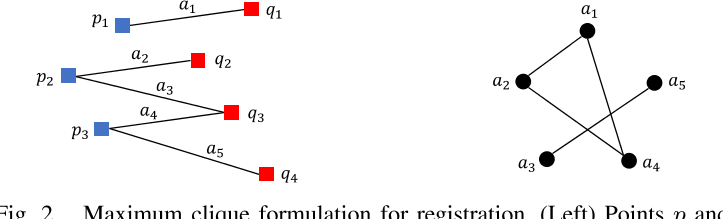
我们提出了一种新的框架,用于在非结构化环境中对车辆进行全局定位和引导重新定位。与现有方法相比,我们的方法不依赖于城市设施(例如车道标记、建筑物)的提示,也不要求车辆在道路网络上行驶的假设。相反,我们通过将车辆的局部语义对象图与紧凑的语义参考图牢固地关联和匹配,实现了城市和非城市环境中的定位。通过我们的基于图的数据关联算法实现了对噪声、异常值和丢失对象的鲁棒性。
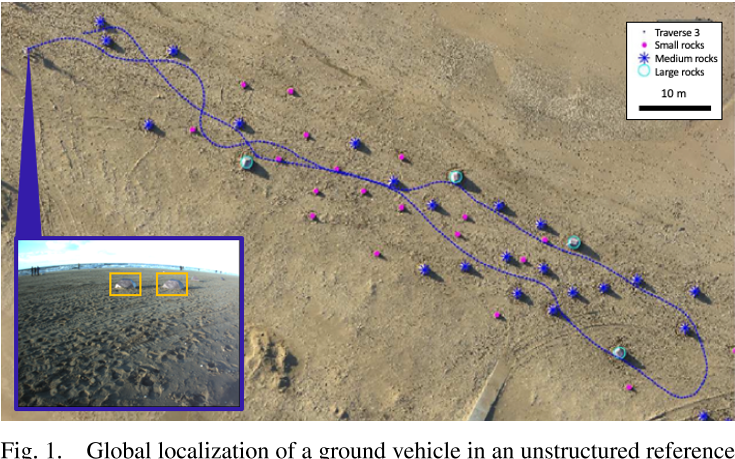
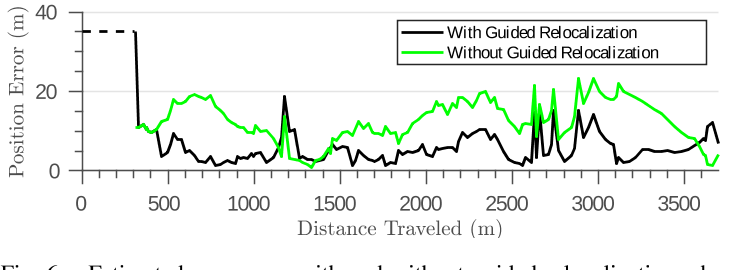
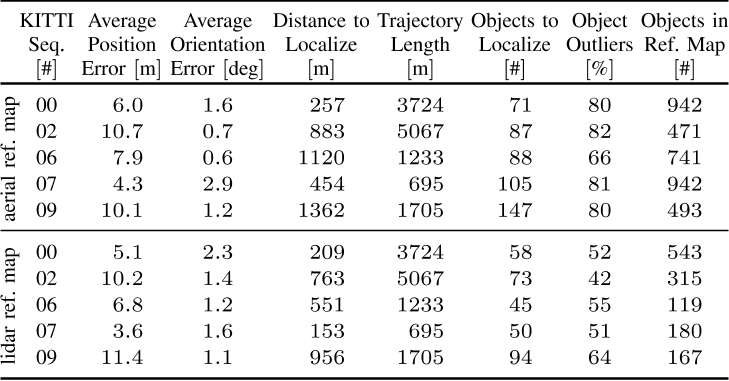
此外,我们方法的引导重定位能力减轻了初始全局定位后基于里程计的定位中固有的漂移。我们在两个公开可用的真实世界数据集上评估了我们的方法,以证明其在非城市和城市环境中的定位的有效性。Katwijk Beach Planetary Rover数据集用于展示我们的方法在非结构化环境中执行精确全局定位的能力。当在从航空图像创建的参考地图中进行定位时,KITTI数据集上的演示在序列00上的所有35个定位事件中实现了3.8 m的平均姿态误差。与现有工作相比,我们的方法更通用,因为它可以使用从不同视角构建的地图,在非结构化环境中执行全局定位。
本文贡献如下:
1、由于其基于图形的对象关联公式和紧凑语义图的使用,全局定位框架对异常值和视角变化具有鲁棒性。
2、能够在非结构化环境中本地化的框架。在没有关于城市环境存在的先前假设的情况下,已证明相同的方法在非结构化环境中成功定位,如Katwijk Beach Planetary Rover数据集。
3、一种引导重定位模式,用于在全局定位后持续校正姿态估计,以减少漂移的影响。
4、一个成功定位和引导重定位的演示,使用来自不同日期拍摄的具有许多异常值的航空图像的参考地图,在KITTI数据集的真实数据上实现最先进的性能。