没错,自从把ubuntu搞坏之后无奈把之前的例程全删了,因此所有的笔记都没了,又得从新分析一遍
main函数
先从最简单的main分析
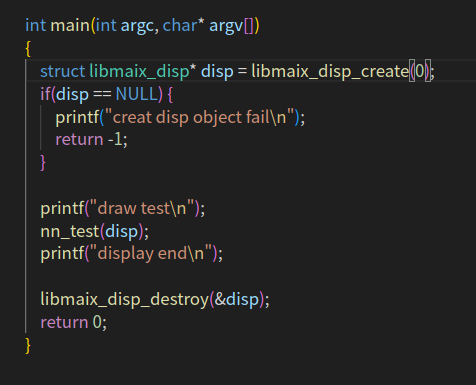
此函数主要创建一个屏幕句柄用来显示,然后调用nn_test来开始yolov2的操作,并且传入画布,显示等都在里面操作,最后跳出来后摧毁屏幕
nn_test函数
此函数很长,一点点分析
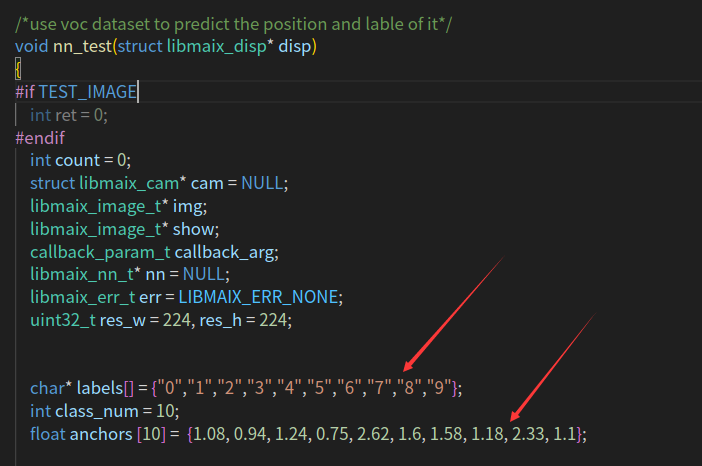
创建一堆变量,然后写入标签,画框大小,这个画框大小是按比例的,两个一组,然后输入的yolov2长宽是固定的,是224*224的其他的都很好看懂,除了callback句柄
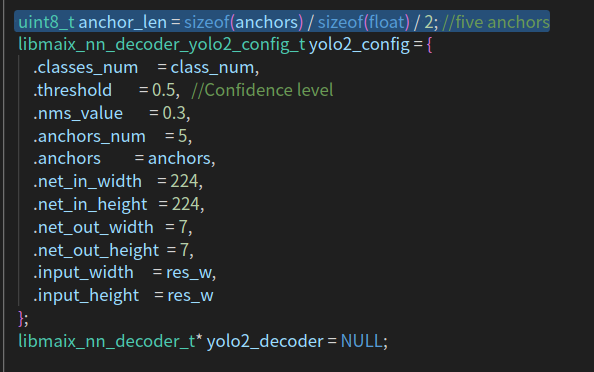
这里设置了框的个数和设置yolov2的设置初始化参数和解码句柄。
#define TEST_IMAGE 0
#define DISPLAY_TIME 1
#if DISPLAY_TIME
struct timeval start, end;
int64_t interval_s;
#define CALC_TIME_START() do{gettimeofday( &start, NULL );}while(0)
#define CALC_TIME_END(name) do{gettimeofday( &end, NULL ); \
interval_s =(int64_t)(end.tv_sec - start.tv_sec)*1000000ll; \
printf("%s use time: %lld us\n", name, interval_s + end.tv_usec - start.tv_usec);\
}while(0)
#else
#define CALC_TIME_START()
#define CALC_TIME_END(name)
#endif
printf("--nn module init\n");
libmaix_nn_module_init();
printf("--image module init\n");
libmaix_image_module_init();
libmaix_camera_module_init();
/*create the net process img is not display image*/
printf("--create image\n");
img = libmaix_image_create(res_w, res_h, LIBMAIX_IMAGE_MODE_RGB888, LIBMAIX_IMAGE_LAYOUT_HWC, NULL, true);
if(!img)
{
printf("create RGB image fail\n");
goto end;
}
// the show image for display
show = libmaix_image_create(disp->width, disp->height, LIBMAIX_IMAGE_MODE_RGB888, LIBMAIX_IMAGE_LAYOUT_HWC, NULL, true);
if(!show)
{
printf("create RGB image fail\n");
goto end;
}
// camera init
#if !TEST_IMAGE
printf("--create cam\n");
cam = libmaix_cam_create(0, res_w, res_h, 1, 1);
if(!cam)
{
printf("create cam fail\n");
goto end;
}
printf("--cam start capture\n");
err = cam->start_capture(cam);
if(err != LIBMAIX_ERR_NONE)
{
printf("start capture fail: %s\n", libmaix_get_err_msg(err));
goto end;
}
#ifdef CONFIG_ARCH_V831
libmaix_cam_t* cam2 = libmaix_cam_create(1, disp->width, disp->height, 0, 0);
#endif
#ifdef CONFIG_ARCH_V831
err = cam2->start_capture(cam2);
#endif
#endif这一段则是是否湖区图片和帧计算的,同时创建两张画布

这里则是设置模型的路径,我们训练好模型后主要改的就是这里
libmaix_nn_layer_t input = {
.w = yolo2_config.net_in_width,
.h = yolo2_config.net_in_height,
.c = 3, //通道数
.dtype = LIBMAIX_NN_DTYPE_UINT8,
.data = NULL,
.need_quantization = true,
.buff_quantization = NULL
};
libmaix_nn_layer_t out_fmap = {
.w = yolo2_config.net_out_width,
.h = yolo2_config.net_out_height,
.c = (class_num + 5) * anchor_len, //通道数
.dtype = LIBMAIX_NN_DTYPE_FLOAT,//输入是uint8输出是浮点数
.data = NULL
};
char* inputs_names[] = {"input0"};
char* outputs_names[] = {"output0"};设置输入输出的句柄
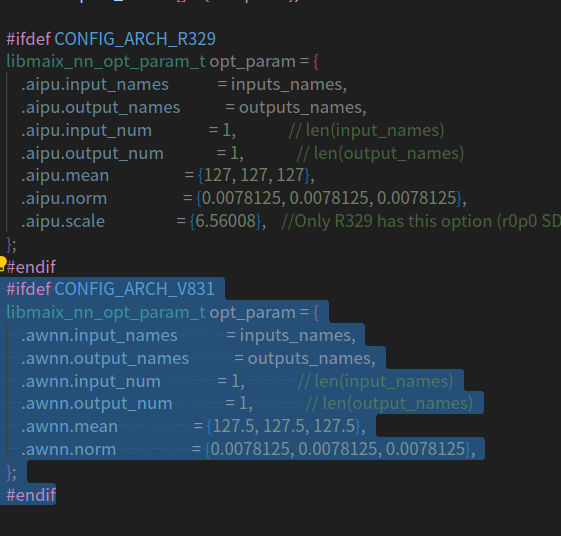
模型的总设置参数,这个在训练的时候应该就设置好了的,不大需要改动
// malloc buffer
float* output_buffer = (float*)malloc(out_fmap.w * out_fmap.h * out_fmap.c * sizeof(float));
if(!output_buffer)
{
printf("no memory!!!\n");
goto end;
}
//allocate quantized data buffer
uint8_t* quantize_buffer = (uint8_t*)malloc(input.w * input.h * input.c);
if(!quantize_buffer)
{
printf("no memory!!!\n");
goto end;
}
out_fmap.data = output_buffer;
input.buff_quantization = quantize_buffer;对输入输出的句柄进行内存给予
// nn model init
printf("-- nn create\n");
nn = libmaix_nn_create();
if(!nn)
{
printf("libmaix_nn object create fail\n");
goto end;
}
printf("-- nn object init\n");
err = nn->init(nn);
if(err != LIBMAIX_ERR_NONE)
{
printf("libmaix_nn init fail: %s\n", libmaix_get_err_msg(err));
goto end;
}
printf("-- nn object load model\n");
err = nn->load(nn, &model_path, &opt_param);
if(err != LIBMAIX_ERR_NONE)
{
printf("libmaix_nn load fail: %s\n", libmaix_get_err_msg(err));
goto end;
}创建nn,并且初始化nn模型,这里其实不打需要改动,也是因为我能力不足吧
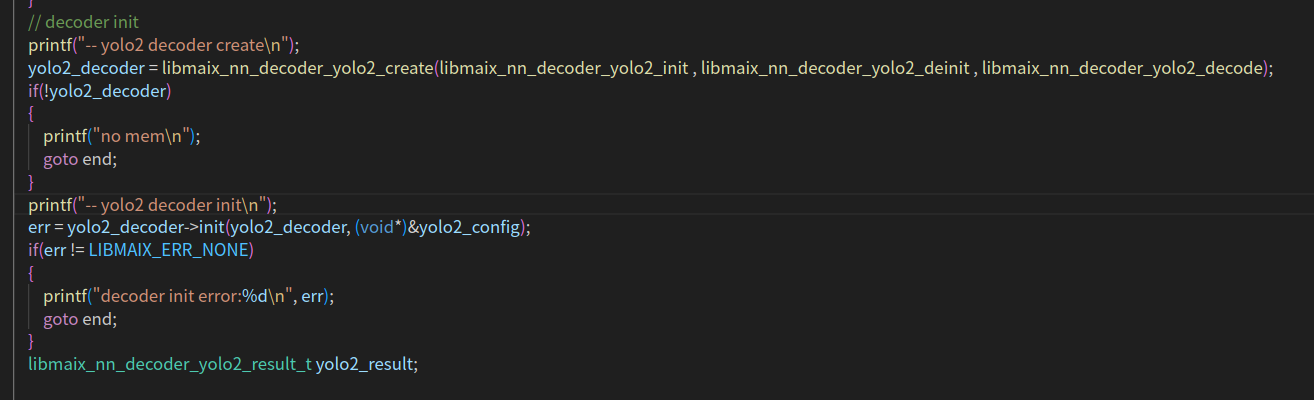
yolov2模型的初始化,参数设置完了也不需要改动,接下来就是开始循环
#if !TEST_IMAGE
err = cam->capture_image(cam,&img);
# ifdef CONFIG_ARCH_V831
err = cam2->capture_image(cam2, &show);
#endif
if(err != LIBMAIX_ERR_NONE)
{
// not ready, sleep to release CPU
if(err == LIBMAIX_ERR_NOT_READY)
{
usleep(20 * 1000);
continue;
}
else
{
printf("capture fail: %s\n", libmaix_get_err_msg(err));
break;
}
}
#endif抓取图像,如果err为0说明cpu还没准备好,需要稍等一下否则就是失败了
CALC_TIME_START();
input.data = (uint8_t *)img->data;
err = nn->forward(nn, &input, &out_fmap);
if(err != LIBMAIX_ERR_NONE)
{
printf("libmaix_nn forward fail: %s\n", libmaix_get_err_msg(err));
break;
}
err = yolo2_decoder->decode(yolo2_decoder, &out_fmap, (void*)&yolo2_result);
if(err != LIBMAIX_ERR_NONE)
{
printf("yolo2 decode fail: %s\n", libmaix_get_err_msg(err));
goto end;
}
#ifdef CONFIG_ARCH_R329
callback_arg.disp = disp;
callback_arg.img = img;
if(yolo2_result.boxes_num > 0)
{
printf("yolo2_result_boxes_num is %d \n",yolo2_result.boxes_num);
libmaix_nn_decoder_yolo2_draw_result(yolo2_decoder, &yolo2_result, count++, labels, on_draw_box, (void*)&callback_arg);
}
err = libmaix_cv_image_resize(img, disp->width, disp->height, &show);
disp->draw_image(disp,show);
CALC_TIME_END("one image");
#endif
#ifdef CONFIG_ARCH_V831
callback_arg.disp = disp;
callback_arg.img = show;
if(yolo2_result.boxes_num > 0)
{
printf("yolo2_result_boxes_num is %d \n",yolo2_result.boxes_num);
libmaix_nn_decoder_yolo2_draw_result(yolo2_decoder, &yolo2_result, count++, labels, on_draw_box, (void*)&callback_arg);
}
disp->draw_image(disp,show);
#endif
disp->draw_image(disp,show);接下来就是对抓取到的图片进行yolov2的解析,并且开始计时计算帧数,其中img是给r329的,show是v831的
#if TEST_IMAGE
break;
#endif
}
end:
if(yolo2_decoder)
{
yolo2_decoder->deinit(yolo2_decoder);
libmaix_nn_decoder_yolo2_destroy(&yolo2_decoder);
}
if(output_buffer)
{
free(output_buffer);
}
if(nn)
{
libmaix_nn_destroy(&nn);
}
if(cam)
{
printf("--cam destory\n");
libmaix_cam_destroy(&cam);
}
if(show)
{
printf("--image destory\n");
libmaix_image_destroy(&show);
}
if(img)
{
printf("--image destory\n");
libmaix_image_destroy(&img);
}
printf("--image module deinit\n");
libmaix_nn_module_deinit();
libmaix_image_module_deinit();
libmaix_camera_module_deinit();接下来就是对创建的句柄等等进行一个个的销毁
小结
那么简单的解析就到此,我们做模型的话只需要改动路径和框比例就差不多了,其他不怎么需要我们动手,但是这代码实在是繁琐,我尝试着简化一下